

Основные методы крепления пружин
При проведении расчетов уделяется внимание тому, каким образом проводится соединение пружин. Этот момент оказывает влияние на следующее:
- Жесткость системы. Этот показатель встречается практически во всех проводимых расчетах при последовательном подключении деталей. Зависит он от самых различных моментов, к примеру, коэффициента жесткости каждого.
- Требуемое усилие для сжатия или растяжения. Рассматриваемая деталь применяется часто по причине того, что может обеспечивает накопление кинетической энергии.
- Размер кинетической и потенциальной энергии. После того как изделие было выведено из положения равновесия начинает накапливаться кинетическая энергия. При этом она сохраняется на протяжении всего периода, пока к телу приложено усилие.
- Вероятность возникновения свободного колебательного движения, а также степень сопротивления подобному явлению. Для расчетов колебательного движения также применяются специальные формулы.
Они характеризуются довольно большим количеством особенностей
Прежде чем рассматривать применение подобных способов соединения следует уделить внимание особенностям самого изделия:
- Деталь изготавливается из проволоки, которая получается методом проката. Она обладает высоким показателем упругости, а также устойчивостью к воздействию окружающей среды.
- Прокат изготавливают из специального сплава, способного выдерживать периодическую деформацию. Под заказ может производится деталь из обычных углеродистых сплавов или легированных металлов, все зависит от конкретного случая.
- Проволока накручивается в виде колец по спирали. При этом должна выдерживаться едина ось, которая определяет распространение силы в одном направлении.
- Выделяют два основных типа детали: растяжения и сжатия. Первый вариант исполнения характеризуется тем, что витки находятся практически вплотную. В случае изготовления изделия для сжатия выдерживается определенный зазор, который позволяет кольцам сближаться, а самому изделию сжиматься.
- Характеризуется изделие самыми различными показателями. Примером можно назвать диаметр проволоки, созданных колец из нее, шаг расположения витков. Все эти параметры указываются в технической документации.

Сегодня они встречаются практически повсеместно. Это связано с тем, что подобное изделие практически незаменимо в случае, когда требуется возвратно-поступательное движение.
Особенности расчета жесткости соединений пружин
Важный моментом является расчет нескольких упругих элементов, соединенных последовательно или параллельно.
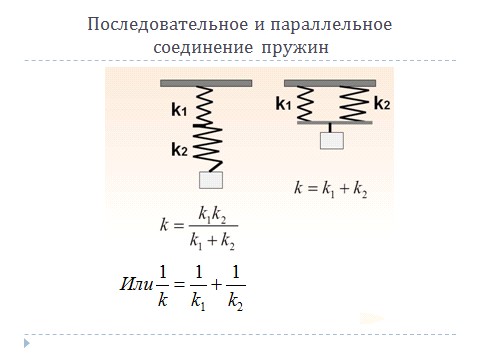
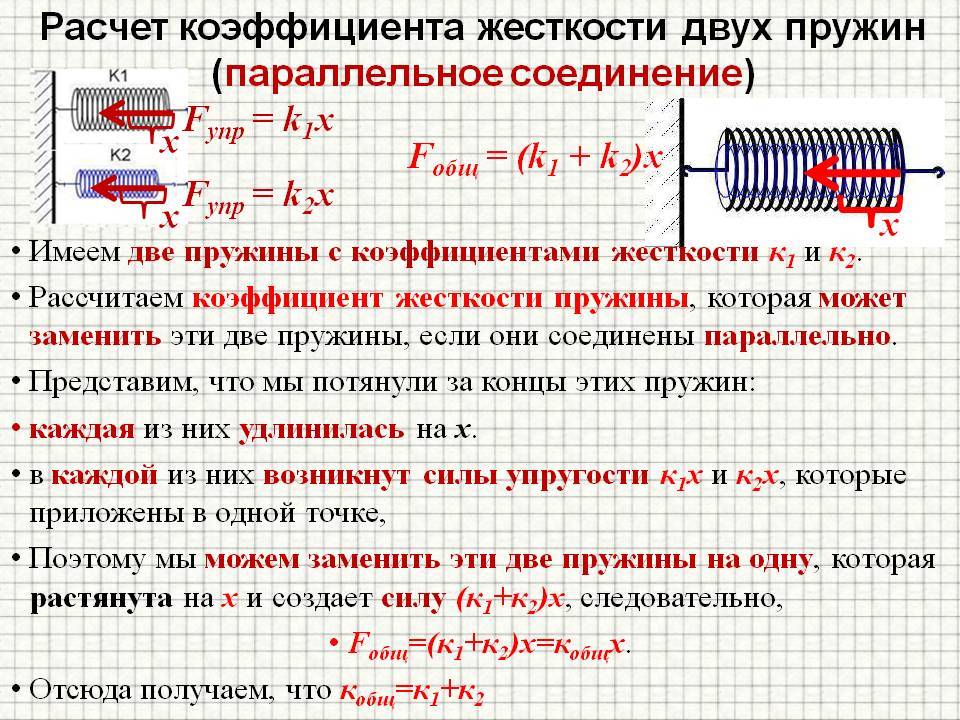
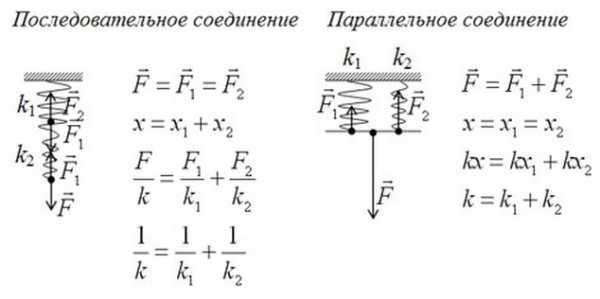
При параллельном расположении нескольких деталей общая жесткость этой системы определяется простой суммой коэффициентов отдельных комплектующих. Как нетрудно заметить, жесткость системы больше, чем отдельной детали.
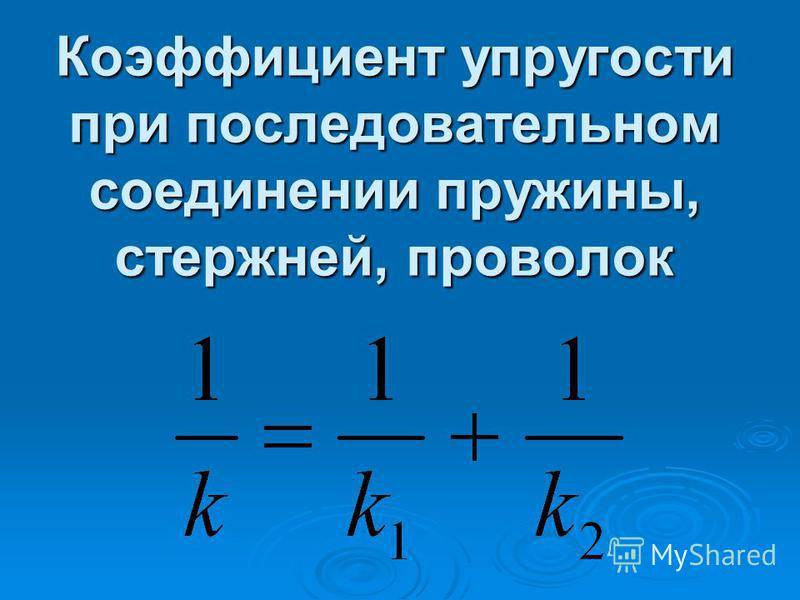
При последовательном расположении формула более сложная: величина, обратная суммарной жесткости, равна сумме величин, обратных к жесткости каждой комплектующей. В этом варианте сумма меньше слагаемых.
Используя эти зависимости, легко определиться с правильным выбором упругих комплектующих для конкретного случая.
Пружина – упругий объект, целенаправленно подвергающийся сжатию или растяжению, в результате чего может запасать энергию, а затем, при ослабевании внешней деформирующей силы, возвращать ее. Пружины в нормальных условиях не должны подвергаться остаточным (пластическим) деформациям, т.е. таким воздействиям, после которых форма изделия уже не восстанавливается вследствие нарушения структуры их материала.
Вопрос 8.4 Замена системы пружин эквивалентной пружиной
П
ри описании колебательного движения систему пружин, действующих на материальную точку, заменяют одной пружиной, жесткость которой равна жесткости системы. Эту пружину называют эквивалентной. Рассмотрим три основные схемы соединения пружин.
1 Параллельное соединение
(рисунок 8.1).
П
Рисунок 8.1
араллельно соединенные пружины, если их деформации одинаковы, можно заменить эквивалентной пружиной, коэффициент жесткости которой равен сумме коэффициентов жесткости соединенных пружин,
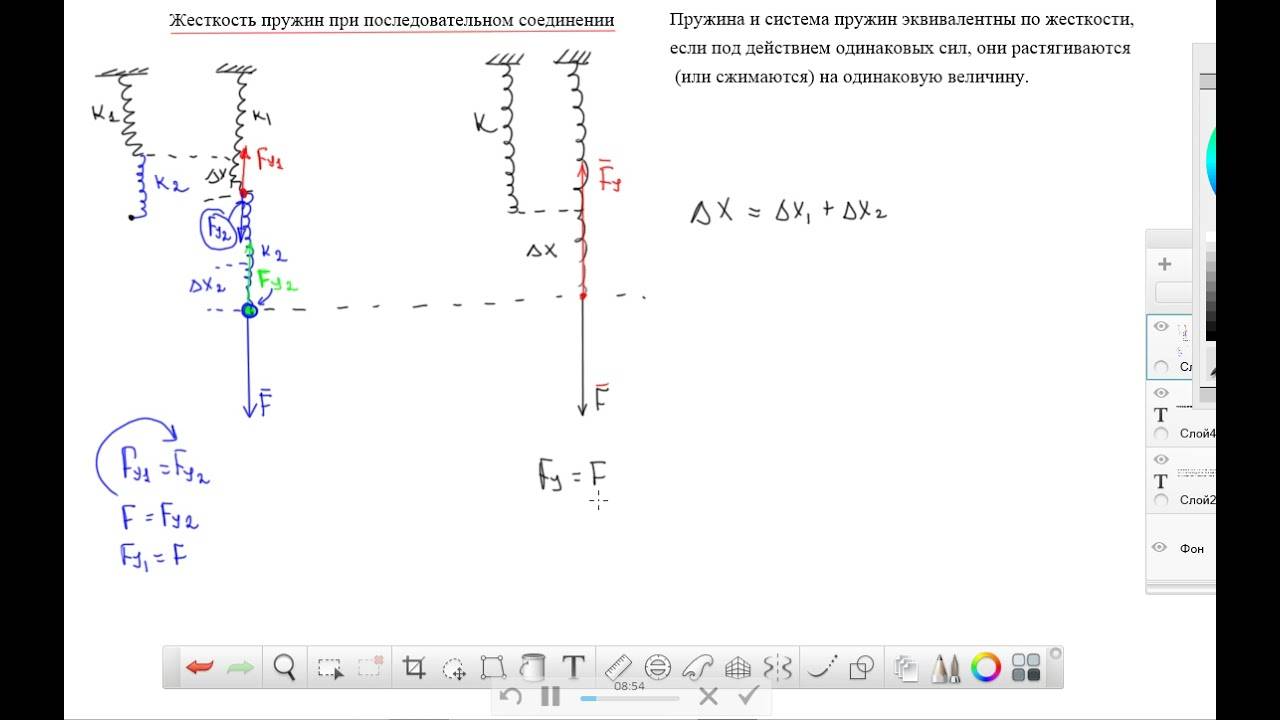
2 Последовательное соединение
(рисунок 8.2).
П
ри последовательном соединении нескольких пружин они могут быть заменены эквивалентной пружиной, податливость которой равна сумме податливостей соединенных пружин (податливостью пружины называют величину, обратную коэффициенту жесткости). Следовательно, коэффициент жесткости эквивалентной пружины в данном случае определяется следующим образом:
3
Рисунок 8.2«Двухстороннее» соединение (рисунок 8.3).
П
ри движении исследуемой материальной точки деформации обоих пружин будут одинаковы. Результирующая сила, действующая со стороны этих пружин на точку, будет равна сумме сил упругости в пружинах 1 и 2. Следовательно, коэффициент жесткости эквивалентной пружины будет равен сумме коэффициентов жесткости пружин 1 и 2:
Любую систему пружин можно представить как набор рассмотренных схем.
Рисунок 8.3
Лекция 9
Динамика материальной системы.
(2 часа, 1 семестр, 2 курс)
Вопрос 9.1Теорема о движении центра масс материальной системы.
Центром масс материальной системы называют точку, радиус-вектор
которой определяется по формуле
,
где
– масса материальной системы;
mi
, – масса и радиус-векторi -й материальной точки.
,
где xi
,yi ,zi – координаты центра массi -го тела системы.
При решении задач динамики материальной системы часто оказывается полезной теорема о движении центра масс
:произведение массы материальной системы
на ускорение ее центра массaCравно геометрической сумме внешних сил, приложенных к системе :
В ходе решения выражение теоремы проецируют на оси координат. При этом получается система уравнений
Использование теоремы о движении центра масс материальной системы для решения задач динамики рекомендуется осуществлять по следующей методике:
1 Изображается материальная система, и указываются все внешние силы, действующие на нее.
2 Выбираются оси координат.
3 Внешние силы, действующие на систему, проецируются на выбранные оси.
4 Записываются выражения координат центра масс системы через координаты центров масс одного из тел системы.
5 Дифференцируя выражения координат центра масс по времени, получают зависимости для скорости и ускорения центра масс системы.
6 Полученные выражения подставляются в систему динамических уравнений.
7 Решается дифференциальное уравнение относительно искомой координаты с учетом заданных начальных условий.
Вопрос 9.2Динамические уравнения движения твердого тела.
Динамические уравнения движения твердого тела устанавливают связь между кинематическими характеристиками движения тела и действующими на него силами.
Поступательное движение тела.
В этом случае динамическое уравнение представляет собой следствие из теоремы о движении центра масс:
,
где m
– масса тела;
– ускорение центра масс тела;
–i -тая сила, действующая на тело.
При решении задач динамическое уравнение поступательного движения тела проецируют на оси координат.
Вращательное движение тела
. Для него динамическое уравнение имеет вид:
,
где Jz
– момент инерции тела относительно оси вращенияz ;
– угловое ускорение тела;
Miz
– моментi -й силы относительно оси вращения.
При составлении динамического уравнения вращательного движения тела выбирается направление отсчета угла поворота . Моменты сил, вращающих тело против выбранного направления, принимаются отрицательными, а по выбранному направлению – положительными.







Момент инерцииJzявляется мерой инертности тела при вращательном движении. Момент инерции материальной системы относительно данной осиOz определяется как сумма произведений масс всех точек системы на квадраты их расстояний от этой оси:
Для абсолютно твердого тела суммирование по точкам системы заменяется интегрированием по объему
,
где ρ – плотность материала тела;
h
– расстояние от точки с координатамиx ,y ,z до осиOz .
Момент инерции JC
тела относительно осиCz , проходящей через центр массC , называютцентральным моментом инерци и. Если для тела известенрадиус инерцииi , то центральный момент
. Центральные моменты инерции некоторых тел:
1 Тонкий однородный стержень с массой m
и длинойl :
. 2 Тонкое круглое однородное кольцо с массой m
и радиусомR :
. 3 Круглый однородный диск с массой m
и радиусомR :
. studfiles.net
Сила Архимеда
Сила возникает в результате взаимодействия тела с жидкость (газом), при его погружении в жидкость (или газ). Эта сила выталкивает тело из воды (газа). Поэтому направлена вертикально вверх (выталкивает). Определяется по формуле:
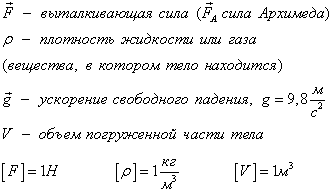
В воздухе силой Архимеда пренебрегаем.
Если сила Архимеда равна силе тяжести, тело плавает. Если сила Архимеда больше, то оно поднимается на поверхность жидкости, если меньше – тонет.

Существуют силы электрического происхождения. Возникают при наличии электрического заряда. Эти силы, такие как Сила Кулона, сила Ампера, сила Лоренца.
I закон Ньютона
Существуют такие системы отсчета, которые называются инерциальными, относительно которых тела сохраняют свою скорость неизменной, если на них не действуют другие тела или действие других сил скомпенсированно.
II закон Ньютона
Ускорение тела прямопропорционально равнодействующей сил, приложенных к телу, и обратно пропорционально его массе:
III закон Ньютона
Силы, с которыми два тела действуют друг на друга, равны по модулю и противоположны по направлению.
Локальная система отсчёта
— это система отсчёта, которая может считаться инерциальной, но лишь в бесконечно малой окрестности какой-то одной точки пространства-времени, или лишь вдоль какой-то одной незамкнутой мировой линии.
Преобразования Галилея. Принцип относительности в классической механике.
Преобразования Галилея. Рассмотрим две системы отсчета движущиеся друг относительно друга и с постоянной скоростью v.Одну из этих систем обозначим буквой K. Будем считать неподвижной. Тогда вторая система Kбудет двигаться прямолинейно и равномерно. Выберем координатные оси x,y,z системы K и x’,y’,z’ системы K’ так что оси x и x’ совпадали, а оси y и y’ , z и z’, были параллельны друг другу. Найдем связь между координатами x,y,z некоторой точки P в системе K и координатами x’,y’,z’ той же точки в системе K’. Если начать отсчёт времени с того момента, когда начало координат системы, совпадали, то x=x’+v, кроме того, очевидно, что y=y’, z=z’. Добавим к этим соотношениям принятое в классической механике предположение, что время в обеих системах течёт одинаковым образом, то есть t=t’. Получим совокупность четырёх уравнений : x=x’+vt;y=y’;z=z’;t=t’, названных преобразованиями Галилея.Механический принцип относительности.Положение о том, что все механические явления в различных инерциальных системах отсчёта протекают одинаковым образом, вследствие чего никакими механическими опытами невозможно установить, покоится ли система или движется равномерно и прямолинейно носит названия принцип относительности Галилея.Нарушение классического закона сложения скоростей.Исходя из общего принципа относительности (никаким физическим опытом нельзя отличить одну инерциальною систему от другой), сформулированным Альбертом Эйнштейном, Лоуренс изменил преобразования Галилиея и получил : x’=(x-vt)/(1-v 2 /c 2 ); y’=y; z’=z; t’=(t-vx/c 2 )/(1-v 2 /c 2 ). Эти преобразования называются преобразованиями Лоуренса.
Пружины можно назвать одной из наиболее распространенных деталей, которые являются частью простых и сложных механизмов. При ее изготовлении применяется специальная проволока, накручиваемая по определенной траектории. Выделяют довольно большое количество различных параметров, характеризующих это изделие. Наиболее важным можно назвать коэффициент жесткости. Он определяет основные свойства детали, может рассчитываться и применяться в других расчетах. Рассмотрим особенности подобного параметра подробнее.
Как использовать пружины соответственно их классу
Оба класса – «А» и «В», имеют абсолютно рабочие характеристики, и могут устанавливаться на автомобиль в равной степени. Единственное, что следует помнить при установке – цвета пружин подвески должны быть идентичны по обе стороны автомобиля. В противном случае может образоваться небольшой, но постоянный крен кузова на одну из сторон, что существенно ухудшит управляемость автомобилем и его устойчивость на дороге. Кроме того, если цвет пружин по жесткости будет отличаться, это приведет к ускоренному износу узлов всей «ходовки».
Специалисты достаточно часто говорят о необходимости использования на одном ТС элементов только одного класса. В крайнем случае, допускается устанавливать на переднюю ось пружины класса «А», на заднюю «В». Но ни в коем случае не наоборот – это категорически недопустимо. Чтобы избежать путаницы при самостоятельной замене, маркировка по цветам должна совпадать, так же как и их класс.
Коэффициент жесткости цилиндрической пружины
На практике и в физике довольно большое распространение получили именно цилиндрические пружины. Их ключевыми особенностями можно назвать следующие моменты:
- При создании указывается центральная ось, вдоль которой и действует большинство различных сил.
- При производстве рассматриваемого изделия применяется проволока определенного диаметра. Она изготавливается из специального сплава или обычных металлов. Не стоит забывать о том, что материал должен обладать повышенной упругостью.
- Проволока накручивается витками вдоль оси. При этом стоит учитывать, что они могут быть одного или разного диаметра. Довольно большое распространение получил вариант исполнения цилиндрического типа, но большей устойчивостью характеризуется цилиндрический вариант исполнения, в сжатом состоянии деталь обладает небольшой толщиной.
- Основными параметрами можно назвать больший, средний и малый диаметр витков, диаметр проволоки, шаг расположения отдельных колец.
Не стоит забывать о том, что выделяют два типа деталей: сжатия и растяжения. Их коэффициент жесткости определяется по одной и той же формуле. Разница заключается в следующем:
- Вариант исполнения, рассчитанный на сжатие, характеризуется дальним расположением витков. За счет расстояние между ними есть возможность сжатия.
- Модель, рассчитанная на растяжение, имеет кольца, расположенные практически вплотную. Подобная форма определяет то, что при максимальная сила упругости достигается при минимальном растяжении.
- Также есть вариант исполнения, который рассчитан на кручение и изгиб. Подобная деталь рассчитывается по определенным формулам.
Расчет коэффициента цилиндрической пружины может проводится при использовании ранее указанной формулы. Она определяет то, что показатель зависит от следующих параметров:
- Наружного радиуса колец. Как ранее было отмечено, при изготовлении детали применяется ось, вокруг которой проводится накручивание колец. При этом не стоит забывать о том, что выделяют также средний и внутренний диаметр. Подобный показатель указывается в технической документации и на чертежах.
- Количества создаваемых витков. Этот параметр во многом определяет длину изделия в свободном состоянии. Кроме этого, количество колец определяет коэффициент жесткость и многие другие параметры.
- Радиуса применяемой проволоки. В качестве исходного материала применяется именно проволока, которая изготавливается из различных сплавов. Во многом ее свойства оказывают влияние на качества рассматриваемого изделия.
- Модуля сдвига, который зависит от типа применяемого материала.
Коэффициент жесткости считается одним из наиболее важных параметров, который учитывается при проведении самых различных расчетов.
Что зависит от упругости пружины
Без такого элемента не обходится ни один механизм или прибор. Они применяются и при изготовлении мебели.

Их можно обнаружить в транспортных средствах, в станках, дверных замках и ручках, диванах, матрацах, часах, шариковых ручках и т. д. Где бы ни устанавливалась спираль из проволоки, её работа оказывает решающее влияние на функционирование механизма (изделия).
Так, если она очень жёсткая или мягкая, то установленная в автомобильном амортизаторе не будет способствовать комфортной и безопасной езде по неровной дороге, а если встроена в мебель, то сидеть и лежать на ней будет не очень приятно.
Опытный метод
Чтобы понять, как найти жесткость пружины, а точнее, определить коэффициент жесткости пружины опытным путем, следует произвести следующие манипуляции. Вам необходимо деформировать тело, прилагая к нему силу. Самый простой вид деформации – это сжатие или растяжение. Коэффициент жесткости показывает именно то, какую силу необходимо приложить к телу, чтобы упруго деформировать его на единицу длины. Мы сейчас говорим об упругой деформации, когда тело принимает свою первоначальную форму после совершения воздействия на него. Для того чтобы провести этот наглядный эксперимент вам потребуются следующие вещи:
- калькулятор,
- ручка,
- тетрадь,
- пружина,
- линейка,
- груз.
Итак, один конец пружины закрепите вертикально, а второй оставьте свободным. Измерьте длину пружины и запишите результат в тетрадь (это будет значение x1). Подвесьте к свободному концу пружины груз весом в сто граммов и опять измерьте длину пружины, запишите значение (x2). Рассчитайте абсолютное удлинение пружины (разница значений x1 и x2). При небольших сжатиях и растяжениях сила упругости пропорциональна деформации. Здесь уже применяем Закон Гука, согласно которому Fупр = |kx|, где k и является коэффициентом жесткости. Для того чтобы найти нужный нам коэффициент жесткости надо силу растяжения разделить на удлинение пружины. Силу растяжения находим следующим образом: Fупр = – N = -mg. Отсюда следует, что mg = kx. А значит, k = mg/x. Дальше все просто: подставьте известные вам значения в формулу и найдите, чему равна жёсткость пружины.
Определение
Силу, которая возникает в результате деформации тела и пытающаяся вернуть его в исходное состояние, называют силой упругости.
Чаще всего ее обозначают ${\overline{F}}_{upr}$. Сила упругости появляется только при деформации тела и исчезает, если пропадает деформация. Если после снятия внешней нагрузки тело восстанавливает свои размеры и форму полностью, то такая деформация называется упругой.









Современник И. Ньютона Р. Гук установил зависимость силы упругости от величины деформации. Гук долго сомневался в справедливости своих выводов. В одной из своих книг он привел зашифрованную формулировку своего закона. Которая означала: «Ut tensio, sic vis» в переводе с латыни: каково растяжение, такова сила.
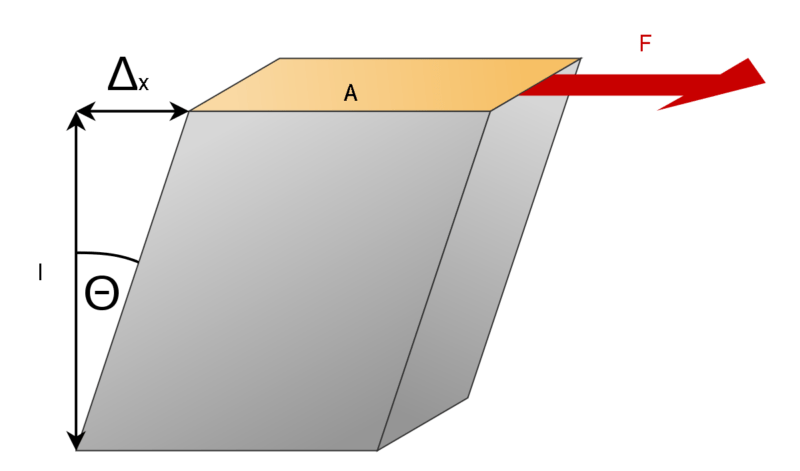
Рассмотрим пружину, на которую действует растягивающая сила ($\overline{F}$), которая направлена вертикально вниз (рис.1).
Силу $\overline{F\ }$ назовем деформирующей силой. От воздействия деформирующей силы длина пружины увеличивается. В результате в пружине появляется сила упругости (${\overline{F}}_u$), уравновешивающая силу $\overline{F\ }$. Если деформация является небольшой и упругой, то удлинение пружины ($\Delta l$) прямо пропорционально деформирующей силе:
где в коэффициент пропорциональности называется жесткостью пружины (коэффициентом упругости) $k$.
Жесткость (как свойство) – это характеристика упругих свойств тела, которое деформируют. Жесткость считают возможностью тела оказать противодействие внешней силе, способность сохранять свои геометрические параметры. Чем больше жесткость пружины, тем меньше она изменяет свою длину под воздействием заданной силы. Коэффициент жесткости – это основная характеристика жесткости (как свойства тела).
Коэффициент жесткости пружины зависит от материала, из которого сделана пружина и ее геометрических характеристик. Например, коэффициент жесткости витой цилиндрической пружины, которая намотана из проволоки круглого сечения, подвергаемая упругой деформации вдоль своей оси может быть вычислена как:
где $G$ – модуль сдвига (величина, зависящая от материала); $d$ – диаметр проволоки; $d_p$ – диаметр витка пружины; $n$ – количество витков пружины.
Единицей измерения коэффициента жесткости в Международной системе единиц (Си) является ньютон, деленный на метр:
\=\frac{\left}{\left}=\frac{Н}{м}.\]
Коэффициент жесткости равен величине силы, которую следует приложить к пружине для изменения ее длины на единицу расстояния.
Видео
Из этого видео вы узнаете, как определить жесткость пружины.
Чем большей деформации подвергается тело, тем значительней в нем возникает сила упругости. Это значит, что деформация и сила упругости взаимосвязаны, и по изменению одной величины можно судить об изменении другой. Так, зная деформацию тела, можно вычислить возникающую в нем силу упругости. Или, зная силу упругости, определить степень деформации тела.
Если к пружине подвешивать разное количество гирек одинаковой массы, то чем больше их будет подвешено, тем сильнее пружина растянется, то есть деформируется. Чем больше растянута пружина, тем большая в ней возникает силы упругости. Причем опыт показывает, что каждая следующая подвешенная гирька увеличивает длину пружины на одну и туже величину.
Так, например, если исходная длина пружины была 5 см, а подвешивание на ней одной гирьки увеличило ее на 1 см (т. е. пружина стала длиной 6 см), то подвешивание двух гирек увеличит ее на 2 см (общая длина составит 7 см), а трех — на 3 см (длина пружины будет 8 см).
Еще до опыта известно, что вес и возникающая под его действием сила упругости находятся друг с другом в прямопропорциональной зависимости. Кратное увеличение веса во столько же раз увеличит силу упругости. Опыт же показывает, что деформация точно также зависит от веса: кратное увеличение веса во столько же раз увеличивает изменения в длине. Это значит, что, исключив вес, можно установить прямопропорциональную зависимость между силой упругости и деформацией.
Если обозначить удлинение пружины в результате ее растяжения как x или как ∆ l ( l 1 – l , где l — начальная длина, l 1 — длина растянутой пружины), то зависимость силы упругости от растяжения можно выразить такой формулой:
В формуле используется коэффициент k . Он показывает, в какой именно зависимости находятся сила упругости и удлинение. Ведь удлинение на каждый сантиметр может увеличивать силу упругости одной пружины на 0,5 Н, второй на 1 Н, а третьей на 2 Н. Для первой пружины формула будет выглядеть как Fупр = 0,5x, для второй — Fупр = x, для третьей — Fупр = 2x.
Коэффициент k называют жесткостью пружины. Чем жестче пружина, тем труднее ее растянуть, и тем большее значение будет иметь k. А чем больше k, тем больше будет сила упругости (Fупр) при равных удлинения (x) разных пружин.
Жесткость зависит от материала, из которого изготовлена пружина, ее формы и размеров.
Единицей измерения жесткости является Н/м (ньютон на метр). Жесткость показывает, сколько ньютонов (сколько сил) надо приложить к пружине, чтобы растянуть ее на 1 м. Или насколько метров растянется пружина, если приложить для ее растяжения силу в 1 Н. Например, к пружине приложили силу в 1 Н, и она растянулась на 1 см (0,01 м). Это значит, что ее жесткость равна 1 Н / 0,01 м = 100 Н/м.
Также, если обратить внимание на единицы измерения, то станет понятно, почему жесткость измеряется в Н/м. Сила упругости, как и любая сила, измеряется в ньютонах, а расстояние – в метрах. Чтобы уровнять по единицам измерения левую и правую части уравнения Fупр = kx, надо в правой части сократить метры (то есть поделить на них) и добавить ньютоны (то есть умножить на них)
Чтобы уровнять по единицам измерения левую и правую части уравнения Fупр = kx, надо в правой части сократить метры (то есть поделить на них) и добавить ньютоны (то есть умножить на них)
Чтобы уровнять по единицам измерения левую и правую части уравнения Fупр = kx, надо в правой части сократить метры (то есть поделить на них) и добавить ньютоны (то есть умножить на них).
Соотношение между силой упругости и деформацией упругого тела, описываемое формулой Fупр = kx, открыл английский ученый Роберт Гук в 1660 году, поэтому это соотношение носит его имя и называется законом Гука.
Упругой деформацией является такая, когда после прекращения действия сил, тело возвращается в свое исходное состояние. Бывают тела, которые почти нельзя подвергнуть упругой деформации, а у других она может быть достаточно большой. Например, поставив тяжелый предмет на кусок мягкой глины, вы измените его форму, и этот кусок сам уже не вернется в исходное состояние. Однако если вы растяните резиновый жгут, то после того, как отпустите его, он вернет свои исходные размеры. Следует помнить, что закон Гука применим только для упругих деформаций.
Формула Fупр = kx дает возможность по известным двум величинам вычислять третью. Так, зная приложенную силу и удлинение, можно узнать жесткость тела. Зная, жесткость и удлинение, найти силу упругости. А зная силу упругости и жесткость, вычислить изменение длины.
Расчет жесткости цилиндрической пружины
Довольно просто понять как работает плоская пружина. Если положить на край письменного стола линейку и прижать один ее конец рукой к поверхности, но второй можно упруго изгибать, запасая и высвобождая энергию. Очевидно, что в момент изгиба расстояния между молекулами материала в некоторых фрагментах линейки увеличиваются, в некоторых уменьшаются. Электромагнитные связи, действующие между молекулами, стремятся вернуть вещество к прежнему геометрическому состоянию.
Несколько сложнее дело обстоит с цилиндрической пружиной. В ней энергия запасается не благодаря деформации изгиба, а за счет скручивания проволоки, из которой пружина навита, относительно продольной оси этой проволоки.
Представим сильно увеличенное сечение проволоки, из которой навита цилиндрическая пружина, выполненное перпендикулярной ее оси плоскостью. При таком рассмотрении можно абстрагироваться от спиральной формы и мысленно разбить весь объем проволоки на множество соприкасающихся торцевыми поверхностями “цилиндров”, диаметр которых равен диаметру проволоки, а высота стремится к нулю. Между соприкасающимися торцами действуют молекулярные силы, препятствующие деформации.
При растяжении или сжатии пружины угол наклона между витками изменяется. Соседние “цилиндры” при этом вращаются друг относительно друга в противоположных направлениях вокруг общей оси. В каждом таком сечении запасается энергия. Отсюда следует, что чем из более длинного куска проволоки навита пружина (здесь играют роль диаметр и высота цилиндра, а также шаг витка), тем большее количество энергии она способна запасти. Увеличение диаметра проволоки также повышает ее энергоемкость. В целом формула, учитывающая основные факторы жесткости пружины, выглядит так:
$k = \frac{r^4}{4R^3} \cdot \frac{G}{n}$,
- $R$ – радиус цилиндра пружины,
- $n$ – количество витков проволоки радиуса $r$,
- $G$ – коэффициент, зависящий от материала.
Подставим в формулу числовые значения, попутно переведя их в единицы системы СИ:
$k = \frac{(10^{-3})^4}{4 \cdot (2 \cdot 10^{-2})^3} \cdot \frac{8 \cdot 10^{10}}{25} = \frac{8 \cdot 10^{-2}}{10^2 \cdot 2^3 \cdot 10^{-6}} = 100$
Ответ: $100 \frac{Н}{м}$
При воздействии внешних сил тела способны приобретать ускорения или деформироваться. Деформацией называют изменение размеров и (или) формы тела. Если после снятия внешней нагрузки тело восстанавливает свои размеры и форму полностью, то такая деформация называется упругой.
Пусть на пружину на рис.1 действует растягивающая сила, направленная вертикально вниз.
При воздействии деформирующей силы ($\overline{F}$) длина пружины увеличивается. В пружине возникает сила упругости (${\overline{F}}_u$), которая уравновешивает деформирующую силу. Если деформация небольшая и упругая, то удлинение пружины ($\Delta l$) пропорционально деформирующей силе:
где в качестве коэффициента пропорциональности выступает жесткость пружины $k$. Коэффициент $k$ называют также коэффициентом упругости, коэффициентом жесткости. Жесткость (как свойство) характеризует упругие свойства тела, подвергаемого деформации – это возможность тела оказывать противодействие внешней силе, сохранять свои геометрические параметры. Коэффициент жесткости является основной характеристикой жесткости.
Коэффициент жесткости пружины зависит от материала, из которого изготовлена пружина, ее геометрических характеристик. Так, коэффициент жесткости витой цилиндрической пружины, которая намотана из проволоки круглого сечения, подвергаемая упругой деформации вдоль своей оси вычисляется при помощи формулы:
где $G$ -модуль сдвига (величина зависящая от материала); $d$ – диаметр проволоки; $d_p$ – диаметр витка пружины; $n$ – количество витков пружины.
Опытный метод
Чтобы понять, как найти жесткость пружины, а точнее, определить коэффициент жесткости пружины опытным путем, следует произвести следующие манипуляции. Вам необходимо деформировать тело, прилагая к нему силу. Самый простой вид деформации – это сжатие или растяжение. Коэффициент жесткости показывает именно то, какую силу необходимо приложить к телу, чтобы упруго деформировать его на единицу длины. Мы сейчас говорим об упругой деформации, когда тело принимает свою первоначальную форму после совершения воздействия на него. Для того чтобы провести этот наглядный эксперимент вам потребуются следующие вещи:
- калькулятор,
- ручка,
- тетрадь,
- пружина,
- линейка,
- груз.
Итак, один конец пружины закрепите вертикально, а второй оставьте свободным. Измерьте длину пружины и запишите результат в тетрадь (это будет значение x1). Подвесьте к свободному концу пружины груз весом в сто граммов и опять измерьте длину пружины, запишите значение (x2). Рассчитайте абсолютное удлинение пружины (разница значений x1 и x2). При небольших сжатиях и растяжениях сила упругости пропорциональна деформации. Здесь уже применяем Закон Гука, согласно которому Fупр = |kx|, где k и является коэффициентом жесткости. Для того чтобы найти нужный нам коэффициент жесткости надо силу растяжения разделить на удлинение пружины. Силу растяжения находим следующим образом: Fупр = – N = -mg. Отсюда следует, что mg = kx. А значит, k = mg/x. Дальше все просто: подставьте известные вам значения в формулу и найдите, чему равна жёсткость пружины.
Определение
Силу, которая возникает в результате деформации тела и пытающаяся вернуть его в исходное состояние, называют силой упругости.
Чаще всего ее обозначают ${\overline{F}}_{upr}$. Сила упругости появляется только при деформации тела и исчезает, если пропадает деформация. Если после снятия внешней нагрузки тело восстанавливает свои размеры и форму полностью, то такая деформация называется упругой.
Современник И. Ньютона Р. Гук установил зависимость силы упругости от величины деформации. Гук долго сомневался в справедливости своих выводов. В одной из своих книг он привел зашифрованную формулировку своего закона. Которая означала: «Ut tensio, sic vis» в переводе с латыни: каково растяжение, такова сила.
Рассмотрим пружину, на которую действует растягивающая сила ($\overline{F}$), которая направлена вертикально вниз (рис.1).






Силу $\overline{F\ }$ назовем деформирующей силой. От воздействия деформирующей силы длина пружины увеличивается. В результате в пружине появляется сила упругости (${\overline{F}}_u$), уравновешивающая силу $\overline{F\ }$. Если деформация является небольшой и упругой, то удлинение пружины ($\Delta l$) прямо пропорционально деформирующей силе:
где в коэффициент пропорциональности называется жесткостью пружины (коэффициентом упругости) $k$.
Жесткость (как свойство) – это характеристика упругих свойств тела, которое деформируют. Жесткость считают возможностью тела оказать противодействие внешней силе, способность сохранять свои геометрические параметры. Чем больше жесткость пружины, тем меньше она изменяет свою длину под воздействием заданной силы. Коэффициент жесткости – это основная характеристика жесткости (как свойства тела).
Коэффициент жесткости пружины зависит от материала, из которого сделана пружина и ее геометрических характеристик. Например, коэффициент жесткости витой цилиндрической пружины, которая намотана из проволоки круглого сечения, подвергаемая упругой деформации вдоль своей оси может быть вычислена как:
где $G$ – модуль сдвига (величина, зависящая от материала); $d$ – диаметр проволоки; $d_p$ – диаметр витка пружины; $n$ – количество витков пружины.
Единицей измерения коэффициента жесткости в Международной системе единиц (Си) является ньютон, деленный на метр:
\=\frac{\left}{\left}=\frac{Н}{м}.\]
Коэффициент жесткости равен величине силы, которую следует приложить к пружине для изменения ее длины на единицу расстояния.





